有限公司")

HH2MD542-06
所屬分類:
產(chǎn)品描述
一、概述
2DM542 是數(shù)字式兩相步進(jìn)驅(qū)動,采用最新的 32 位 ARM處理器進(jìn)行控制。此數(shù)字驅(qū)動器外設(shè)細(xì)分、電流、輔助功能撥碼,用戶可根據(jù)需要自由設(shè)置,內(nèi)部編寫先進(jìn)驅(qū)動控制算法,能保證步進(jìn)電機(jī)在各速度段精準(zhǔn)、穩(wěn)定運(yùn)行,其中,內(nèi)置細(xì)分算法,能使電機(jī)在低轉(zhuǎn)速時(shí)平穩(wěn)運(yùn)行;中高速力矩補(bǔ)償算法,能最大限度的提高電機(jī)中高轉(zhuǎn)速時(shí)的轉(zhuǎn)矩;參數(shù)自整定算法,能自適應(yīng)各種電機(jī),最大限度發(fā)揮電機(jī)性能;內(nèi)置平滑算法,能極大提升電機(jī)加減速性能。總之,此數(shù)字驅(qū)動器能夠滿足大多數(shù)場合的應(yīng)用,是一款性價(jià)比極高的運(yùn)動
控制產(chǎn)品。
二、特點(diǎn)
● 參數(shù)自整定,電機(jī)自適應(yīng);
● 內(nèi)置高細(xì)分,振動小,低發(fā)熱,低速運(yùn)行平穩(wěn);
● 中、高速力矩補(bǔ)償;
● 電流矢量控制,電流效能高;
● 內(nèi)置加減速控制,改善啟停平滑性;
● 單、雙脈沖控制模式可選擇;
● 電機(jī)運(yùn)行位置記憶;
● 輸入信號差分光耦隔離,兼容 5V~24V;
● 用戶可自定義細(xì)分;
● 過流保護(hù),過壓保護(hù);
● 自動檢測,可靈活選擇脈沖邊沿計(jì)數(shù)方式;
● 綠燈表示運(yùn)行,紅燈表示保護(hù)或脫機(jī);
三、端口說明
3.1 控制信號輸入端口
| 端子號 |
符號
|
名稱 | 說明 |
| 1 | ENA- | 使能輸入負(fù) | 兼容 5V~24V 電平 |
| 2 | ENA+ | 使能輸入正 | |
| 3 | DIR- | 方向輸入負(fù) | 兼容 5V~24V 電平 |
| 4 | DIR+ | 方向輸入正 | |
| 5 | PLS- | 脈沖輸入負(fù) | 兼容 5V~24V 電平 |
| 6 | PLS+ | 脈沖輸入正 |
3.2 功率端口
| 端子號 | 標(biāo)識 | 符號 | 名稱 | 說明 |
| 1 | 電機(jī)相線 | B- | 電機(jī) B-端 | 電機(jī) B 相繞組 |
| 2 | B+ | 電機(jī) B+端 | ||
| 3 | A- | 電機(jī) A-端 | 電機(jī) A 相繞組 | |
| 4 | A+ | 電機(jī)A+端 | ||
| 5 | 電源輸入端 | VCC | 電源正極 | DC24V~48V |
| 6 | GND | 電源負(fù)極 |
四、技術(shù)指標(biāo)
| 輸入電壓 | DC24V~48V | |
| 最大脈沖頻率 | 200K | |
| 默認(rèn)通訊速率 | 57.6Kbps | |
| 保護(hù) | 過電流動作值 峰值10A±10% 過壓電壓動作值 60VDC | |
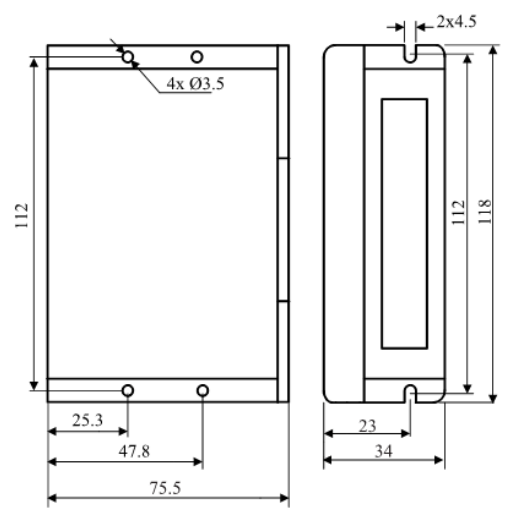
| 外形尺寸(mm) | 118x75.5x34 | |
| 重量 | 約260g | |
| 使 用 環(huán) 境 | 場合 | 盡量避免粉塵、油霧及腐蝕性氣體 |
| 工作溫度 | 0~70℃ | |
| 儲存溫度 | -20℃~+80℃ | |
| 濕度 | 40~90%RH | |
| 冷卻方式 | 自然冷卻或強(qiáng)制冷風(fēng) | |
五、控制信號接線
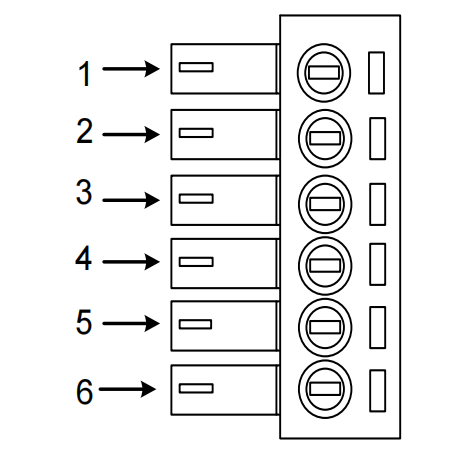
5.1 控制信號單端共陽極接線
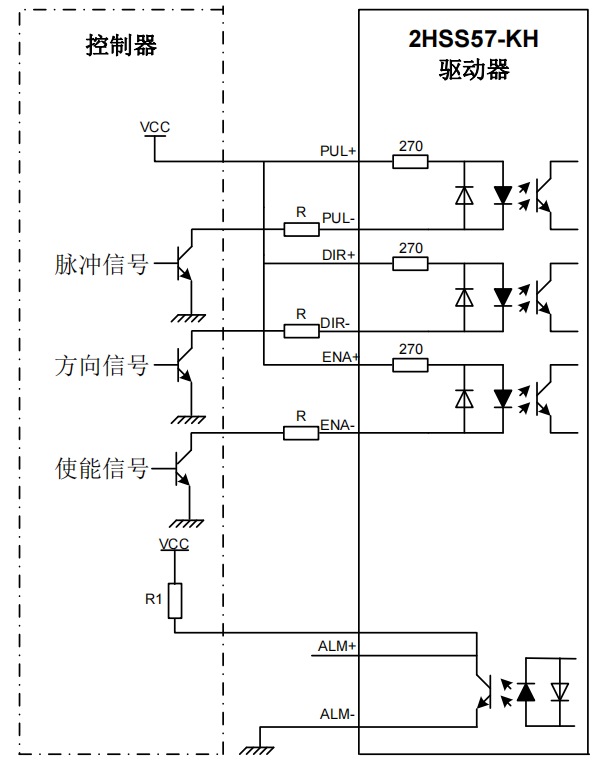
注意: VCC 可兼容 5V~24V。
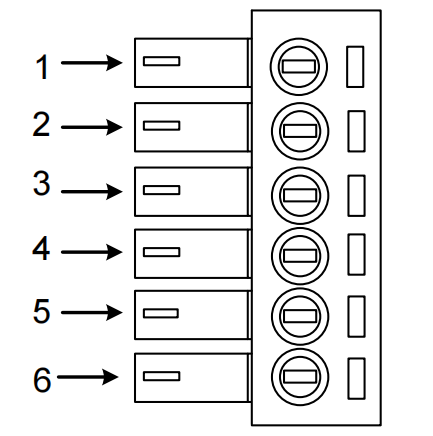
5.2 控制信號單端共陰極接線
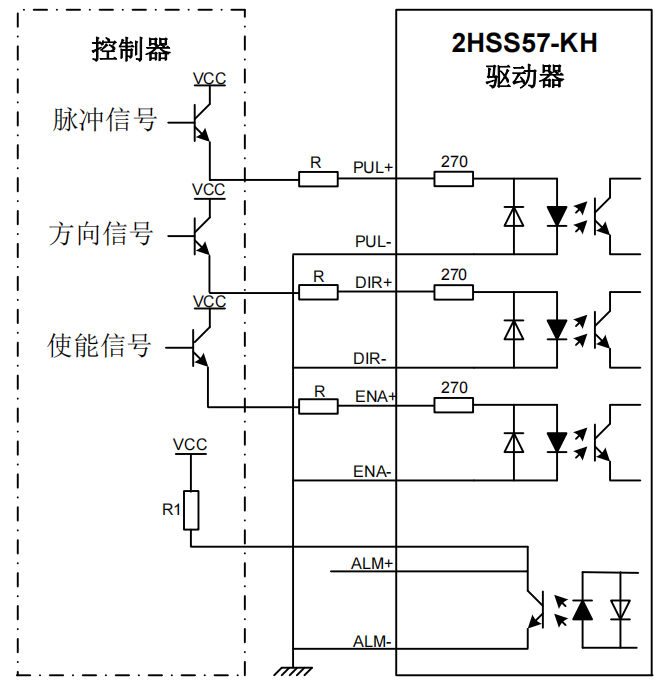
注意: VCC 可兼容 5V~24V。
5.3 控制信號差分接線方式
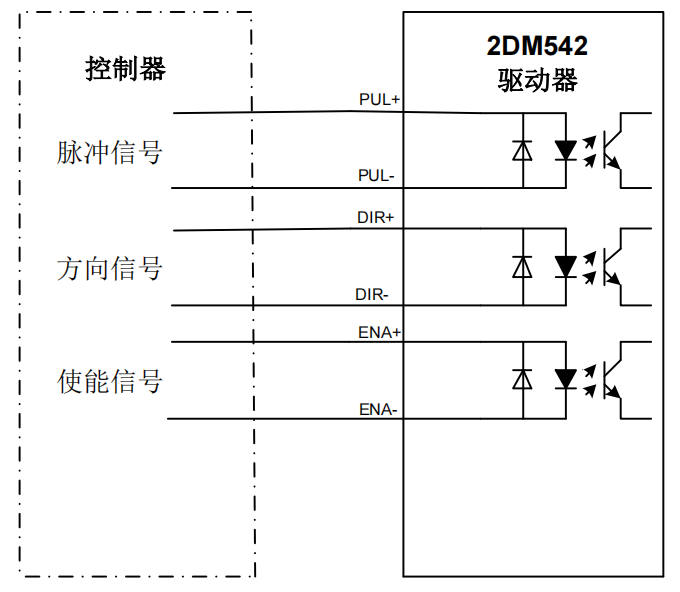
注意: VCC 可兼容 5V~24V。
5.4 232 串口通信接線圖
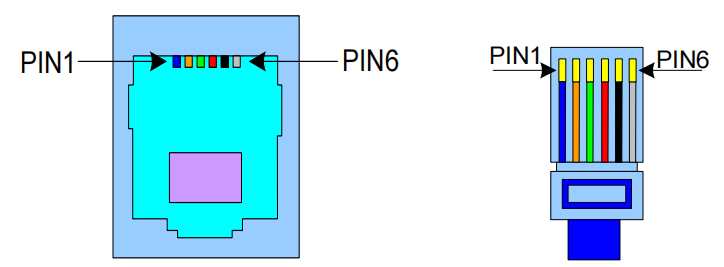
| 水晶頭腳位 | 定義 | 說明 |
| 1 | TXD | 發(fā)送端 |
| 2 | RXD | 接收端 |
| 4 | +5V | 僅供外部 HISU |
| 6 | GND | 電源地 |
5.5 控制信號時(shí)序圖
為了避免一些誤動作和偏差,PUL、DIR 和 ENA 應(yīng)滿足一定要求,如下圖所示:
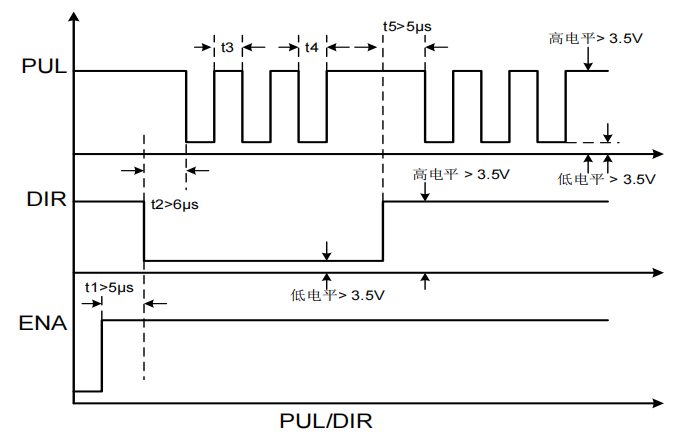
注釋:
(1)t1:ENA(使能信號)應(yīng)提前 DIR 至少 5μ s,確定為高。一般情況下建議 ENA+和 ENA-懸空即可。
(2)t2:DIR 至少提前 PUL 計(jì)數(shù)邊沿 6μ s 確定其狀態(tài)高或低。
(3)t3:脈沖寬度不小于 2.5μ s。
(4)t4:低電平寬度不小于 2.5μ s。
六、撥碼開關(guān)設(shè)定
6.1 SW-2 撥碼開關(guān)說明
SW-2 撥碼開關(guān)主要是電流大小以及細(xì)分的設(shè)置,用戶可根據(jù)實(shí)際需求設(shè)置,每一次調(diào)整都要重新上電,所設(shè)置的值才能有效。
6.1.1 電流撥碼設(shè)置
SW-2電流撥碼設(shè)置如下表所示。
| 電流/拔碼開關(guān) | SW1 | SW2 | SW3 | |
| 峰值 | 有效值 | |||
| 1.0A | 0.71A | 1 | 1 | 1 |
| 1.46A | 1.04A | 0 | 1 | 1 |
| 1.91A | 1.36A | 1 | 0 | 1 |
| 2.37A | 1.69A | 0 | 0 | 1 |
| 2.84A | 2.03A | 1 | 1 | 0 |
| 3.31A | 2.36A | 0 | 1 | 0 |
| 3.76A | 2.69A | 1 | 0 | 0 |
| 4.2A | 3.0A | 0 | 0 | 0 |
6.1.2 停止電流設(shè)定
電機(jī)停止時(shí)(即停止給脈沖),電流可由SW4設(shè)定,off表示停止電流比電機(jī)正常運(yùn)轉(zhuǎn)時(shí)要減小,on表示停止電流與電機(jī)正常運(yùn)轉(zhuǎn)時(shí)一樣。一般建議將SW4設(shè)定為off,可以有效的減小電機(jī)和驅(qū)動器的發(fā)熱狀況。設(shè)置調(diào)試板的P15參數(shù)可更改停止給脈沖多長時(shí)間后電流開始減小,默認(rèn)為50ms;設(shè)置調(diào)試板的P16參數(shù)可更改電流減小百分比,默認(rèn)為減小50%。
6.1.3 細(xì)分撥碼設(shè)置
驅(qū)動器的細(xì)分由撥碼開關(guān)設(shè)置,具體設(shè)置下表所示。另外,當(dāng)細(xì)分撥碼表不能滿足用戶需要時(shí),用戶可通過調(diào)試板自定義細(xì)分,設(shè)置參數(shù)P14為4~1000,則驅(qū)動器細(xì)分為4*50~1000*50,當(dāng)設(shè)置調(diào)試板參數(shù)P14為0時(shí),用戶自定義細(xì)分功能失效,此時(shí)細(xì)分由撥碼開關(guān)設(shè)置。
SW-2細(xì)分撥碼設(shè)置如下表所示。
| 細(xì)分/撥碼開關(guān) | SW5 | SW6 | SW7 | SW8 |
| 400 | 0 | 1 | 1 | 1 |
| 800 | 1 | 0 | 1 | 1 |
| 1600 | 0 | 0 | 1 | 1 |
| 3200 | 1 | 1 | 0 | 1 |
| 6400 | 0 | 1 | 0 | 1 |
| 12800 | 1 | 0 | 0 | 1 |
| 25600 | 0 | 0 | 0 | 1 |
| 1000 | 1 | 1 | 1 | 0 |
| 2000 | 0 | 1 | 1 | 0 |
| 4000 | 1 | 0 | 1 | 0 |
| 5000 | 0 | 0 | 1 | 0 |
| 8000 | 1 | 1 | 0 | 0 |
| 10000 | 0 | 1 | 0 | 0 |
| 20000 | 1 | 0 | 0 | 0 |
| 25000 | 0 | 0 | 0 | 0 |
6.2 SW-1 側(cè)撥碼開關(guān)說明
SW-1 撥碼開關(guān)主要是一些輔助功能,前三個(gè)撥碼分別對應(yīng)單項(xiàng)輔助功能,分別是電機(jī)自檢測、脈沖計(jì)數(shù)方式以及單雙脈沖選擇;第四和第五個(gè)撥碼為平滑系數(shù)的設(shè)定,最后一個(gè)撥碼保留。
SW-1 撥碼開關(guān)輔助功能如下表所示。
| 撥碼開關(guān)/選項(xiàng) | 0 | 1 |
| SW1 | 正常運(yùn)行 | 自動測試 |
| SW2 | 單脈沖 | 雙脈沖 |
| SW3 | 上升沿 | 下降沿 |
SW-1平滑系數(shù)的撥碼設(shè)置如下表所示。
| 平滑系數(shù) | SW4 | SW5 |
| 0 | 0 | 0 |
| 1 | 0 | 1 |
| 2 | 1 | 0 |
| 3 | 1 | 1 |
七、錯(cuò)誤報(bào)警及 LED 燈閃爍次數(shù)
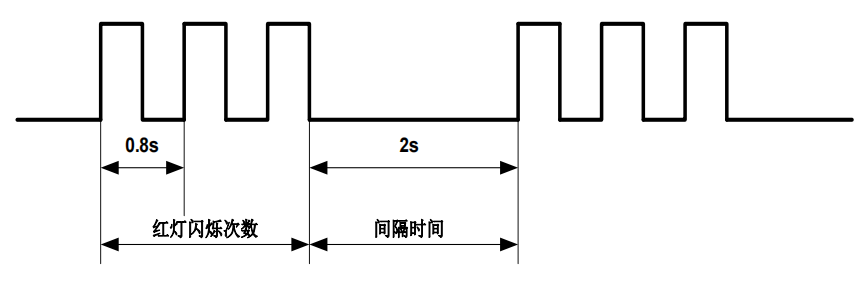
| 紅燈閃爍次數(shù) | 報(bào)警說明 |
| 1 | 驅(qū)動器過流 |
| 2 | 驅(qū)動器內(nèi)部電壓參考錯(cuò)誤 |
| 3 | 驅(qū)動器參數(shù)上傳錯(cuò)誤 |
| 4 | 驅(qū)動器供電電壓超過最大值 |
八、安裝尺寸
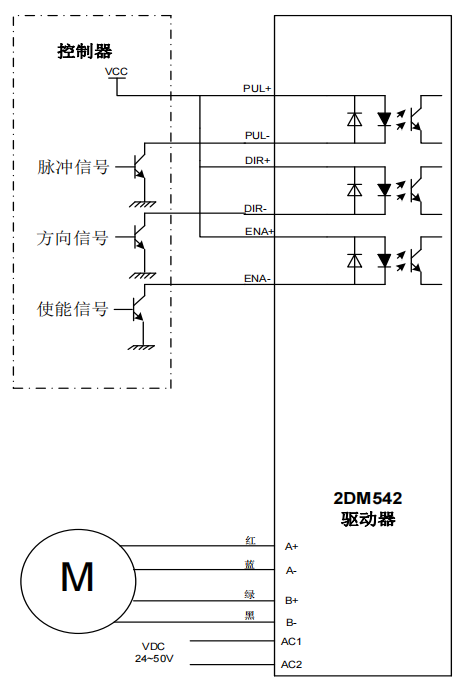
九、接線圖
2DM542的參考如圖:
十、參數(shù)設(shè)置
2DM542 驅(qū)動器的參數(shù)設(shè)置方法:通過 HISU 調(diào)試器的RS232 串行通訊口,采用專用調(diào)試板完成參數(shù)設(shè)置,驅(qū)動器內(nèi)部存有一套對應(yīng)電機(jī)最佳的默認(rèn)出廠配置參數(shù),用戶只須按照具體使用情況調(diào)整驅(qū)動器內(nèi)部參數(shù)即可,具體參數(shù)及功能見下表:
參數(shù)的實(shí)際值=設(shè)定值╳相應(yīng)的量綱
| 序號 | 名稱 | 范圍 | 量綱 | 重啟 驅(qū)動 | 默認(rèn) 參數(shù) |
| P1 | 電流環(huán)比例 | 0_4000 | 1 | 是 | 1000 |
| P2 | 電流環(huán)積分 | 0_1000 | 1 | 是 | 50 |
| P3 | 系統(tǒng)阻尼系數(shù) | 0_500 | 1 | 否 | 200 |
| P4 | 第一共振點(diǎn)幅值 | 0-100 | 1 | 否 | 0 |
| P5 | 第一共振點(diǎn)相位 | 0-100 | 1 | 否 | 0 |
| P6 | 第二共振點(diǎn)幅值 | 0-100 | 1 | 否 | 0 |
| P7 | 第二共振點(diǎn)相位 | 0-100 | 1 | 否 | 0 |
| P8 | 低速震動阻尼系數(shù) | 0-1000 | 1 | 否 | 0 |
| P9 | 保留 | ||||
| P10 | 使能信號電平 | 0-1 | 1 | 否 | 0 |
| P11 | 初始方向選擇 | 0-1 | 1 | 否 | 1 |
| P12 | 保留 | ||||
| P13 | 保留 | ||||
| P14 | 用戶自定義細(xì)分 | 4-1000 | 50 | 是 | 0 |
| P15 | 停止半流時(shí)間 | 0-4000 | 1ms | 是 | 100 |
| P16 | 停止電流百分比 | 0-100 | 1 | 是 | 50 |
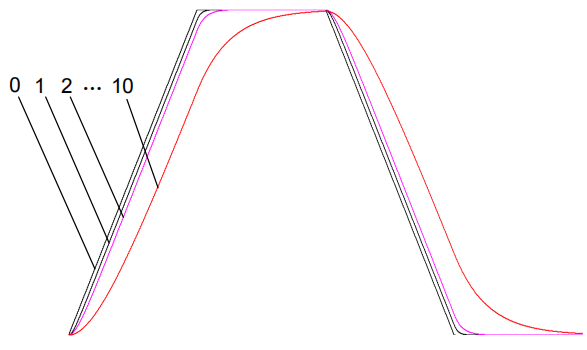
| P17 | 指令平滑系數(shù) | 0-10 | 1 | 是 | 0 |
| P18 | 位置記憶使能 | 0-1 | 1 | 是 | 0 |
| P19 | 用戶自定義電機(jī)電感 | 0-100 | mh | 是 | 0 |
| P20 | 用戶自定義電機(jī)電阻 | 0-100 | 0.1Ω | 是 | 0 |
| P21 | 位置記憶結(jié)果 | 0-128 | 1 | 0 | |
| P22 | 位置記憶啟動時(shí)間 | 保留 |
此驅(qū)動共有 22 個(gè)參數(shù)可以調(diào)節(jié):
參數(shù) P1,P2 用于設(shè)置上電瞬間電流環(huán)的比例和積分參數(shù)。當(dāng) P1 參數(shù)為 1000 時(shí),電機(jī)運(yùn)行時(shí)電流環(huán)的比例、積分參數(shù)由自整定算法自動得到。
參數(shù) P3 用于調(diào)節(jié)系統(tǒng)阻尼系數(shù),用于增強(qiáng)電機(jī)在中高速時(shí)的力矩,同時(shí)也能抑制振動。
參數(shù) P4,P5,P6,P7,P8 分別用于消除電機(jī)的三個(gè)共振點(diǎn)。其中 P4,P5,P6,P7 分別用來消除電機(jī)在 4 轉(zhuǎn)/秒以下轉(zhuǎn)速時(shí)的振動,P8 用于消除電機(jī)轉(zhuǎn)速為 4 轉(zhuǎn)/秒左右時(shí)的振動。
參數(shù) P10,用于使能電平選擇,0 表示使能信號為高電平是電機(jī)處于脫機(jī)狀態(tài),1 表示使能信號為低電平時(shí)電機(jī)處于脫機(jī)狀態(tài)。
參數(shù) P11,用于初始方向選擇,1 表示初始方向?yàn)槟鏁r(shí)針方向,0 表示初始方向?yàn)轫槙r(shí)針方向。
參數(shù) P12,保留。
參數(shù) P13,保留。
參數(shù) P14,用于用戶自定義細(xì)分,設(shè)置為 0 時(shí)表示使用撥碼開關(guān)設(shè)置細(xì)分,設(shè)置為 4~1000 時(shí)表示細(xì)分分別為4*50~1000*50,例如,設(shè)置 P14 為 80,則驅(qū)動器細(xì)分設(shè)置為80*50=4000 細(xì)分,此時(shí)撥碼開關(guān)所設(shè)置細(xì)分不起作用。
參數(shù) P15,用于設(shè)置脈沖停止多長時(shí)間后電流開始減小。
參數(shù) P16,用于設(shè)置電流減小的百分比。
參數(shù) P17,指令平滑系數(shù)。
參數(shù) P18,用于使能位置記憶功能,即斷電時(shí)記住電機(jī)相位,防止下次上電時(shí)電機(jī)的抖動。0 表示不啟用位置記憶功能,1 表示啟用位置記憶功能。
參數(shù) P19,用于用戶自己設(shè)定電機(jī)電感。0 表示啟用自辨識算法自動辨識電機(jī)電感,其他數(shù)值表示不啟用辨識算法,采用用戶設(shè)定電感參數(shù)。
參數(shù) P20,用于用戶自己設(shè)定電機(jī)電阻。0 表示啟用自辨識算法自動辨識電機(jī)電阻,其他數(shù)值表示不啟用辨識算法,采用用戶設(shè)定電阻參數(shù)。
參數(shù) P21,用于查看位置記憶結(jié)果。
參數(shù) P22,保留。
十一、常見問題及故障處理
11.1 電源燈不亮
輸入電源故障,請檢電源線路.電壓是否過低
11.2 上電亮紅燈報(bào)警
電機(jī)電源相線是否連接
驅(qū)動器輸入電源電壓是否過高或者過低
11.3 脈沖輸入后不轉(zhuǎn)動
驅(qū)動器的脈沖輸入端的接線是否可靠
驅(qū)動器系統(tǒng)配置中的輸入方式是否為脈沖輸入相關(guān)的輸入方式
電機(jī)是否使能松開
相關(guān)產(chǎn)品
電機(jī)")

電機(jī)")
電機(jī)")
Copyright © 2022 常州恒和電機(jī)有限公司 版權(quán)所有 網(wǎng)站建設(shè):中企動力 常州丨標(biāo)簽丨營業(yè)執(zhí)照
Copyright © 2022 常州恒和電機(jī)有限公司 版權(quán)所有